

 手机资讯
手机资讯 官方微信
官方微信摘要 申请号:201610994908.8申请日:2016.11.11国家/省市:中国哈尔滨(93)公开号:106514494A公开日:2017.03.22主分类号:B24B53/017...
申请号: 201610994908.8 申请日: 2016.11.11
国家/省市: 中国哈尔滨(93)
公开号: 106514494A
公开日: 2017.03.22 主分类号: B24B 53/017(2012.01)
分类号: B24B 53/017(2012.01)
申请人: 哈尔滨工业大学
发明人: 王金虎; 郭兵; 赵清亮; 张春雨; 杨冰; 顾兴士
代理人: 杨立超
代理机构: 哈尔滨市松花江专利商标事务所(23109)
申请人地址: 黑龙江省哈尔滨市南岗区西大直街92号
摘要: 一种基于双圆弧拟合误差补偿的球头砂轮精密修整方法,本发明涉及球头砂轮精密修整方法。本发明是要解决球头砂轮修整成本高,且难以获得较高的面型精度和尺寸精度的问题而提出的一种基于双圆弧拟合误差补偿的球头砂轮精密修整方法。该方法基于碟片形电镀金刚石修整轮磨损量低的特点,设定修整轨迹实现球头砂轮的在位修整,通过对初步修整后球头砂轮面形轮廓的检测及双圆弧拟合得到面形误差方向及大小,最后在精密修整阶段对误差进行补偿,从而修整出表面为标准球面且目标半径为r的球头砂轮,本发明应用于球头砂轮精密修整领域。
主权利要求
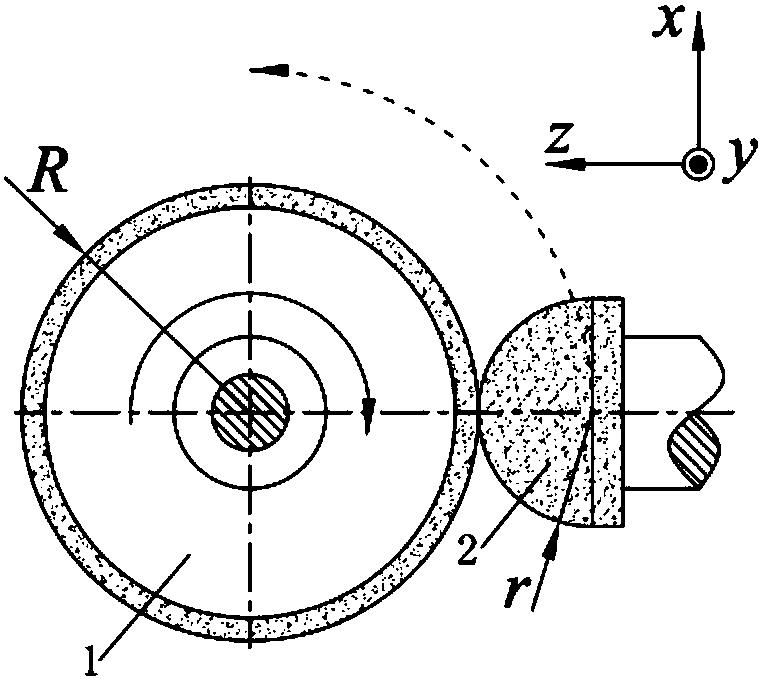
1.一种基于双圆弧拟合误差补偿的球头砂轮精密修整方法,其特征在于,该方法具体是按照以下步骤进行的:步骤一、将修整轮和激光测微仪安装在机床的x轴上,使修整轮回转轴线平行于机床的y轴,激光测微仪的激光光束平行于机床的z轴;球头砂轮安装在z轴上,球头砂轮回转轴线平行于z轴;步骤二、粗对刀,确定修整轮和球头砂轮的位置关系,确定修整运动起始点位置(x0,y0,z0);步骤三、对球头砂轮进行粗修整;使用千分尺测量修整轮的半径R,球头砂轮修整的目标半径为r,以(x0,y0,z0)位置为起始点,以R+r为半径,使机床x轴和z轴联动进行圆弧插补对球头砂轮进行修整;其中,粗修整过程参数为:修整轮转速为1500~6000rpm、球头砂轮转速为500~3000rpm、修整轮对球头砂轮单次修整深度为1~5μm、修整轮修整过程中的进给速率为5~20mm/min;步骤四、粗修整后,基于双圆弧拟合方法对球头砂轮的面型误差进行计算得到x方向对刀的偏心误差Δx以及球头砂轮的半径误差Δr;步骤五、根据偏心差值Δx修正修整运动的起始位置为(x0+Δx,y0,z0),修整出的球头砂轮表面为标准球面;根据球头砂轮的半径误差值Δr修正修整轨迹半径为R+Δr+r,则修整得到目标半径为r的球头砂轮。








 豫公网安备41019702003604号
豫公网安备41019702003604号