

 手机资讯
手机资讯 官方微信
官方微信摘要 申请号:201610588655.4申请日:2016.07.25国家/省市:中国河南(41)公开号:106041740A公开日:2016.10.26主分类号:B24B53/06(2...
申请号: 201610588655.4 申请日: 2016.07.25
国家/省市: 中国河南(41)
公开号: 106041740A
公开日: 2016.10.26
主分类号: B24B 53/06(2006.01)
分类号: B24B 53/06(2006.01); B24B 49/18(2006.01); B24B 51/00(2006.01)
申请人: 郑州磨料磨具磨削研究所有限公司
发明人: 冯克明; 师超钰; 朱建辉
代理人: 胡伟华
代理机构: 郑州睿信知识产权代理有限公司(41119)
申请人地址: 河南省郑州市高新区梧桐街121号
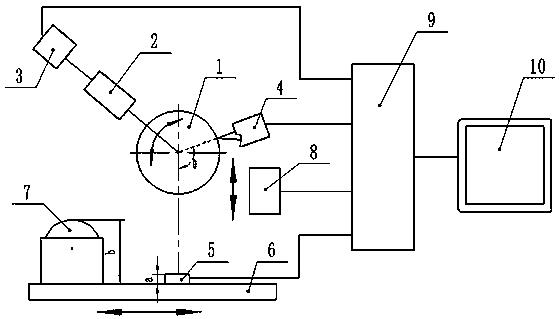
摘要: 本发明公开了一种砂轮精密修整自动对刀方法及装置。砂轮精密修整自动对刀方法包括以下步骤:步骤一,用传感器采集待修整砂轮的表面上各点相对于传感器零点的高度,以确定待修整砂轮表面上的最高点;步骤二,将待修整砂轮的最高点转动到在进给方向与修整器相对的位置;步骤三,沿进给方向移动待修整砂轮,直至待修整砂轮的最高点与修整器在进给方向轴上的距离为零,并以此位置为进刀起点。这实际上是直接以待修整砂轮的最高点为基点进行整个待修整砂轮的对刀,这种对刀方式可精确实现用砂轮表面的最高点进行对刀,使得待修整砂轮在修磨过程中,是从表面的最高点开始进行进给的,从而提高了待修整砂轮对刀的精度。
主权利要求
1.砂轮精密修整自动对刀方法,其特征在于,包括以下步骤:步骤一,计算机控制伺服电机带动待修整砂轮匀速旋转,同时计算机通过非接触位移传感器采集待修整砂轮外圆周上各点的高度和相位信息;步骤二,计算机对采样到的待修整砂轮外圆周上各点的高度和相位信息进行处理,以确定待修整砂轮外圆表面上的最高点的相对高度和相位角;步骤三,计算机控制伺服电机带动待修整砂轮旋转,使待修整砂轮外圆面的最高点转动到与微动开关相对的位置;步骤四,计算机控制进给电机带动待修整砂轮沿进给方向移动,直至待修整砂轮外圆周的最高点与微动开关接触响应时停止,并记录待修整砂轮当前在进给方向上的坐标位置;步骤五,依据修整器端点与微动开关在进给方向上的距离,计算机控制进给电机带动待修整砂轮到达待修整砂轮外圆周的最高点与砂轮修整器的端点在进给方向上坐标相等的位置,并以此位置作为砂轮修整进刀的起点。








 豫公网安备41019702003604号
豫公网安备41019702003604号